

Competições Liga Sénior 
Siga em directo via live streaming:
MSL Livestream, Portuguese Open 2018

A liga de Futebol Robótico Médio (Middle Size League – MSL) é uma liga oficial do RoboCup. Duas equipas com 5 robôs completamente autónomos, cujas dimensões vão até 80 cm de altura, 52 cm de diâmetro e 40 kg de peso, defrontam-se num campo semelhante ao de futebol de 11 humano, mas com um tamanho mais reduzido (18 m x 12 m).
Os robôs possuem diversos sensores (câmaras, giroscópios, sonares, etc.) e atuadores (motores, dispositivo de chuto, etc.) que possibilitam que estes joguem de forma completamente autónoma, i.e., sem qualquer intervenção humana. Estes possuem ainda ligação sem fios para poderem comunicar entre si, com o treinador (computador externo) e com o árbitro (via outro computador externo).
Existem por norma dois árbitros: um que regula o jogo e outro que interage com uma interface gráfica. A partir desta interface os robôs tomam conhecimento de todas as faltas, cartões, etc., que ocorrem durante o jogo.
Esta modalidade é uma das que desperta mais atenção devido à sua elevada multidisciplinaridade. O desenvolvimento de uma equipa de robôs com estas dimensões coloca desafios ao nível da mecânica, eletrónica e programação e da sua integração. Por seu lado, a restrição da autonomia coloca desafios ao nível do processamento de sinal, controlo e inteligência artificial. O cenário de competição vai sendo regularmente revisto de forma a constituir um desafio adequado ao estado da tecnologia.
| Elementos da prova | Dimensões | Características | Foto | |
|---|---|---|---|---|
| Local da Prova | Campo de Futebol | 18m x 12m | Campo verde Linhas brancas Linha de golo branca |
 |
| Elementos do jogo | Robôs (x5) | 52cm de diâmetro 80cm de altura |
Autónomos Maioritariamente preto |
 |
| Bola | Tamanho FIFA 5 | Várias cores |  |
|
| Intervenção humana | 2 árbitros (comunicam com os robôs via computador) | |||
| Características da prova | Tempo de Jogo: 30 minutos (15 + 15) | |||
Regras
http://wiki.robocup.org/Middle_Size_League#Rules

Responsáveis
- José Luís Azevedo - UA\SPR (jla@ua.pt)
- Carlos Simplício – IPLeiria (carlos.simplicio@ipleiria.pt)
- Fernando Martins – IPLeiria (fernando.martins@ipleiria.pt)

Na Liga de Simulação 2D, duas equipas de 11 programas de software autónomos (chamados de agentes, em que cada um deles simula o comportamento de um jogador) jogam futebol num estádio de futebol bidimensional virtual representado por um servidor central, chamado SoccerServer. Este servidor tem conhecimento de tudo o que se passa no jogo, ou seja, a posição atual de todos os jogadores e da bola, o comportamento físico e assim por diante.
Cada jogador recebe as medidas (com “ruído”) dos seus sensores virtuais (visuais, acústicos e físicos) e é capaz de executar alguns comandos básicos (como correr, rodar ou chutar), a fim de influenciar o seu ambiente.
Regras
http://wiki.robocup.org/Soccer_Simulation_League#Rules
Responsáveis
- David Simões – UA/SPR (david.simoes@ua.pt)
- Alexandra Batista - IPLeiria (alexandra.nascimento@ipleiria.pt)
- Diogo Batista – IPLeiria (diogo.baptista@ipleiria.pt)
Live streaming:
3D Simulation League

A competição da Liga de Simulação 3D aumenta o realismo do ambiente simulado usado na Liga de Simulação 2D, adicionando a terceira dimensão ao ambiente gráfico e um comportamento físico mais complexo. O robot virtual usado no simulador 3D é basado no robô humanóide NAO (da Aldebaran Robotics), o mesmo usado na Liga de Plataformas Padrão (SPL) desde 2008. A utilização do mesmo modelo de robô para as competições de simulação 3D e SPL representa uma oportunidade para os investigadores que querem testar os seus algoritmos e ideias antes de experimentá-los em robôs reais. Um jogo é jogado por duas equipas de onze jogadores e consiste de duas metades de cinco minutos cada. Tal como na Liga de Simulação 2D, o comportamento de cada jogador é controlado por um programa de software autónomo, denominado agente.
Regras
http://wiki.robocup.org/wiki/Soccer_Simulation_League#Rules
Responsáveis
- David Simões – UA/SPR (david.simoes@ua.pt)
- Alexandra Batista - IPLeiria (alexandra.nascimento@ipleiria.pt)
- Diogo Batista – IPLeiria (diogo.baptista@ipleiria.pt)


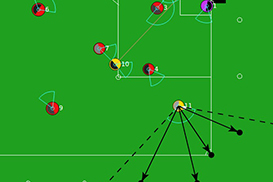
A prova de Condução Autónoma representa um desafio técnico de média complexidade no qual um robô móvel e autónomo deve percorrer um percurso ao longo de uma pista fechada, que apresenta semelhanças marcantes com a condução de um veículo automóvel numa estrada convencional.
A pista utilizada tenta reproduzir, em certa medida, um cenário real, embora a competição decorra num ambiente estruturado. A pista, em formato de 8, ou similar, simula uma estrada com duas vias à qual foram adicionados uma passadeira com um par de painéis semafóricos (um em cada sentido), um túnel, uma zona de obras, um obstáculo, sinais de trânsito e uma área de estacionamento com dois lugares em que um deles está ocupado. A posição do obstáculo na pista e a posição livre nessa área são dados desconhecidos para o robô no início da sua prova.
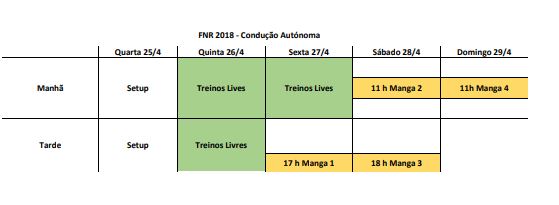
A competição desenvolve-se em quatro fases, realizadas em três dias consecutivos, com diferentes desafios organizados em quatro categorias: desafios de condução, com quatro tipos de desafios; desafios de estacionamento, com quatro tipos de desafios; e desafios de deteção de sinalização de tráfego vertical, com um único tipo de desafio. No final vence a equipa que tiver a melhor pontuação considerando a soma do resultado nos vários desafios.
A classe EXPERT inclui todos os desafios indicados acima, mas existe uma versão simplificada, denominada de classe ROOKIE. Nesta classe o robô pode ser iniciado manualmente, alguns desafios não estão incluidos e alguns são simplificados. Para mais informação consultar as regras abaixo.
Uma equipa é tipicamente constituída por 5 elementos, mas poderá integrar mais elementos, mediante o pagamento de uma verba adicional por elemento.
Poderá inscrever-se mais do que uma equipa proveniente da mesma instituição. As equipas que representem instituições de ensino devem ser constituídas maioritariamente por alunos dessa instituição, podendo contudo incluir professores ou mesmo antigos alunos.
Regras
fnr2018_Autonomous_Driving.pdf
Responsáveis
- Artur Pereira - UA/SPR (artur@ua.pt)
- Carlos Neves – IPLeiria (cneves@ipleiria.pt)
- Hugo Costelha - IPLeiria (hugo.costelha@ipleiria.pt)

O Robot@Factory procura recriar um problema inspirado nos desafios que um robô autónomo terá de enfrentar durante a sua utilização numa fábrica. Esta fábrica é constituída por um armazém de aprovisionamento, um armazém de produto final e oito máquinas de processamento.
O objetivo da competição é que o robô transporte caixas entre armazéns e máquinas em tempo mínimo.
As caixas têm de ser recolhidas, transportadas e depositadas corretamente pelo robô que deve ser capaz de se localizar e navegar entre obstáculos.
A competição decorrerá em três mangas que apresentam desafios de dificuldade crescente. Esta pretende ser uma prova que permita a transição gradual ao nível de complexidade e exigência técnica entre as ligas júniores e séniores, nomeadamente a condução autónoma.
Regras
http://robotica2016.ipb.pt/docs/regras-robot-factory.pdf
Rule clarification for the 2017 robot@factory edition:
As the level of the teams has increased, it has become possible to introduce elements that require more autonomy from the robots. But this should not prevent the accessibility of the competition, hindering the participation of teams with less experience. More advanced robots must be able to have some advantage, without jeopardizing the participation of simpler robots.
Responsáveis
- António Paulo Moreira – FEUP/SPR (amoreira@fe.up.pt)
- Hugo Costelha - IPLeiria (hugo.costelha@ipleiria.pt)


O FreeBots é uma competição que pretende desafiar a comunidade de investigação e desenvolvimento, a nível mundial, a apresentar os seus resultados de investigação, sob a forma de uma apresentação técnica e de uma demonstração pública. O âmbito das demonstrações abrange robôs físicos (um ou mais), móveis ou não, terrestres, aquáticos ou aéreos. A aceitação de equipas / demonstrações pode ser limitada, devido à disponibilidade de condições técnicas no local.
Cada demonstração será avaliada por um júri, composto por personalidades com uma forte ligação à robótica, relativamente à sua: qualidade técnico-científica, potencial de aplicação, a capacidade de apresentar a solução ao público, e a qualidade e o sucesso da demonstração. A equipa com a classificação mais elevada será declarada vencedora da competição.
O ROBOTICA 2018 irá também contemplar actividades envolvendo a utilização de drones (autónomos ou semi-autónomos). Estas serão dinamizadas por diversos grupos de investigação e empresas.
Regras
http://rm.isr.ist.utl.pt/projects/freebots
Responsáveis
- Pedro Lima – UL\SPR (pedro.lima@tecnico.ulisboa.pt)
- Luís Conde Bento - IPLeiria (luis.conde@ipleiria.pt)
- Nuno Vieira Lopes – IPLeiria (nuno.lopes@ipleiria.pt)
