

Major League Competitions 
Live streaming:
MSL Livestream, Portuguese Open 2018

The RS Components Middle Size League is an official league of RoboCup. Two (soccer) teams made up of five autonomous robots, with dimensions up to 80 cm in height, 52 cm in diameter and 40 kg in weight, play on a field similar to a football field, but smaller in size (18 m x 12 m).
Robots have numerous sensors (cameras, gyros, sonar, etc.) and actuators (motors, kickers device, etc.), which enable them to play completely autonomous, without any human intervention. They also have wireless connection in order to communicate among themselves and with the referee.
As a rule, there are two referees: one regulates the game and the other interacts with a graphical interface. This interface makes robots aware of all fouls, cards, etc., that occur during the game.
This particular league attracts great public attention due to its multidisciplinary aspect. Developing a team of robots of this size poses mechanical and electronic challenges. On the other hand, autonomy restriction sets its own challenges in signal processing, control and artificial intelligence. The competitive scenario is regularly reviewed to ensure the challenge is adequate to the state of technology.
| Elements of the competition | Dimensions | Characteristics | Photo | |
|---|---|---|---|---|
| Place of Soccer | Field Event | 18m x 12m | Green field White lines White goal line |
 |
| Game Elements | Robots (x5) | 52cm diameter 80cm height |
Self-employed Mostly black |
 |
| Ball | Size FIFA 5 | Many colours |  |
|
| Human intervention | 2 referees (communicate with robots via computer) | |||
| Characteristics of the test | Game Time: 30 minutes (15 + 15) | |||
Rules
http://wiki.robocup.org/Middle_Size_League#Rules
Coordinating Team
- José Luís Azevedo - UA\SPR (jla@ua.pt)
- Carlos Simplício – IPLeiria (carlos.simplicio@ipleiria.pt)
- Fernando Martins – IPLeiria (fernando.martins@ipleiria.pt)

In the 2D Simulation League, two teams of 11 simulated autonomous software programs (called agents) play soccer in a two-dimensional virtual soccer stadium represented by a central server, called SoccerServer. This server knows everything about the game, i.e. the current position of all players and the ball, the physics and so on.
Each player receives relative and noisy input of his virtual sensors (visual, acoustic and physical) and is able to perform some basic commands (like dashing, turning or kicking) in order to influence its environment.
Rules
http://wiki.robocup.org/Soccer_Simulation_League#Rules
Coordinating Team
- David Simões – UA\SPR (david.simoes@ua.pt)
- Alexandra Batista - IPLeiria (alexandra.nascimento@ipleiria.pt)
- Diogo Batista – IPLeiria (diogo.baptista@ipleiria.pt)
Siga em directo via live streaming:
3D Simulation League

The 3D Simulation competition increases the realism of the simulated environment used in the 2D Simulation League by adding an extra dimension and more complex physics. The virtual robot used in the 3D simulator is based on the Nao humanoid robot from Aldebaran robotics, the robot that is used in the Standard Platform League since 2008.
Using the same model for the simulation competitions represents a great opportunity for researchers wanting to test their algorithms and ideas before trying them into the real robots. A match is played by two teams of eleven players and consists of two halves of five minutes each.
Rules
http://wiki.robocup.org/wiki/Soccer_Simulation_League#Rules
Coordinating Team
- David Simões – UA/SPR (david.simoes@ua.pt)
- Alexandra Batista - IPLeiria (alexandra.nascimento@ipleiria.pt)
- Diogo Batista – IPLeiria (diogo.baptista@ipleiria.pt)


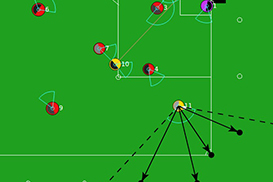
The Autonomous Driving competition constitutes a medium complexity technical challenge in which a mobile, autonomous robot must traverse a route along a closed track which resembles a conventional road.
The track attempts to replicate a real scenario, but the competition takes place in a structured and controlled environment. The track, with an eight-format (or similiar), simulates a two-way road with a zebra-crossing, a pair of traffic lights (one in each direction), a tunnel, a working zone, traffic signs, an obstacle and a parking area with one free space and one occupied space. The position of the obstacle on the track and the free place of the parking area are unknown to the robot at the beginning of each run.
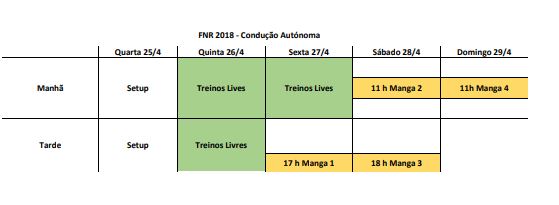
The competition has four rounds that take place over three consecutive days, where different challenges take place, with the winner being the team which has the highest score considering all the challenges. There are four different categories for the challenges: driving challenges, with four different challenges; parking challenges, with four different challenges; and vertical traffic sign detection challenges, with one challenge.
The EXPERT class includes all the above challenges, but there is also a simpler one, called the ROOKIE CLASS. In this class, the robot can be manually started, some challenges are not included and others have some simplifications. For more information, please check the rules below.
A team is typically composed of five elements, but can integrate extra elements by paying an additional amount per element.
A single institution may register multiple teams. Teams representing educational institutions should be mainly formed by students from this institution but may include teachers or former students.
Rules
fnr2018_Autonomous_Driving.pdf
Coordinating Team
- Artur Pereira - UA/SPR (artur@ua.pt)
- Carlos Neves – IPLeiria (cneves@ipleiria.pt)
- Hugo Costelha - IPLeiria (hugo.costelha@ipleiria.pt)

The Robot@Factory aims to recreate the challenges and difficulties that an autonomous robot faces when used in a factory. This factory consists of a supply warehouse, a warehouse of finished product and eight processing machines.
The goal of the competition is to have the robot transfer boxes among warehouses and machines in minimum time.
The mentioned boxes have to be picked-up, transported and correctly placed by the robot that must be able to perform localization, navigation and collision avoidance.
The competition takes place in three rounds that present increasingly difficult challenges. This challenge allows for a gradual transition, in terms of task complexity and technical knowledge requirements, between the junior and major leagues, such as autonomous driving.
Rules
http://robotica2016.ipb.pt/docs/regras-robot-factory.pdf
Rule clarification for the 2017 robot@factory edition:
As the level of the teams has increased, it has become possible to introduce elements that require more autonomy from the robots. But this should not prevent the accessibility of the competition, hindering the participation of teams with less experience. More advanced robots must be able to have some advantage, without jeopardizing the participation of simpler robots.
Coordinating Team
- António Paulo Moreira – FEUP\SPR (amoreira@fe.up.pt)
- Hugo Costelha - IPLeiria (hugo.costelha@ipleiria.pt)


FreeBots is a competition challenging the research and development community, worldwide, to present their research results in the form of a technical presentation and a public demo. The scope of the demos encompasses physical robots (one or more), mobile or not, land, aquatic or aerial. The acceptance of teams/demos may be limited due to the availability of technical conditions at the site.
Each demo will be evaluated by a jury of prominent individuals with a strong connection to robotics with respect to their: technical-scientific quality; application potential; capability to present the solution to the public; and quality and success of the demo. The top team will be declared the winner of the competition.
The National Festival of Robotics 2018 will also cover activities involving drones (autonomous or semi-autonomous). These activities will be streamlined by several research groups and companies.
Rules
http://rm.isr.ist.utl.pt/projects/freebots
Coordinating Team
- Pedro Lima – UL\SPR (pedro.lima@tecnico.ulisboa.pt)
- Luís Conde Bento - IPLeiria (luis.conde@ipleiria.pt)
- Nuno Vieira Lopes – IPLeiria (nuno.lopes@ipleiria.pt)
